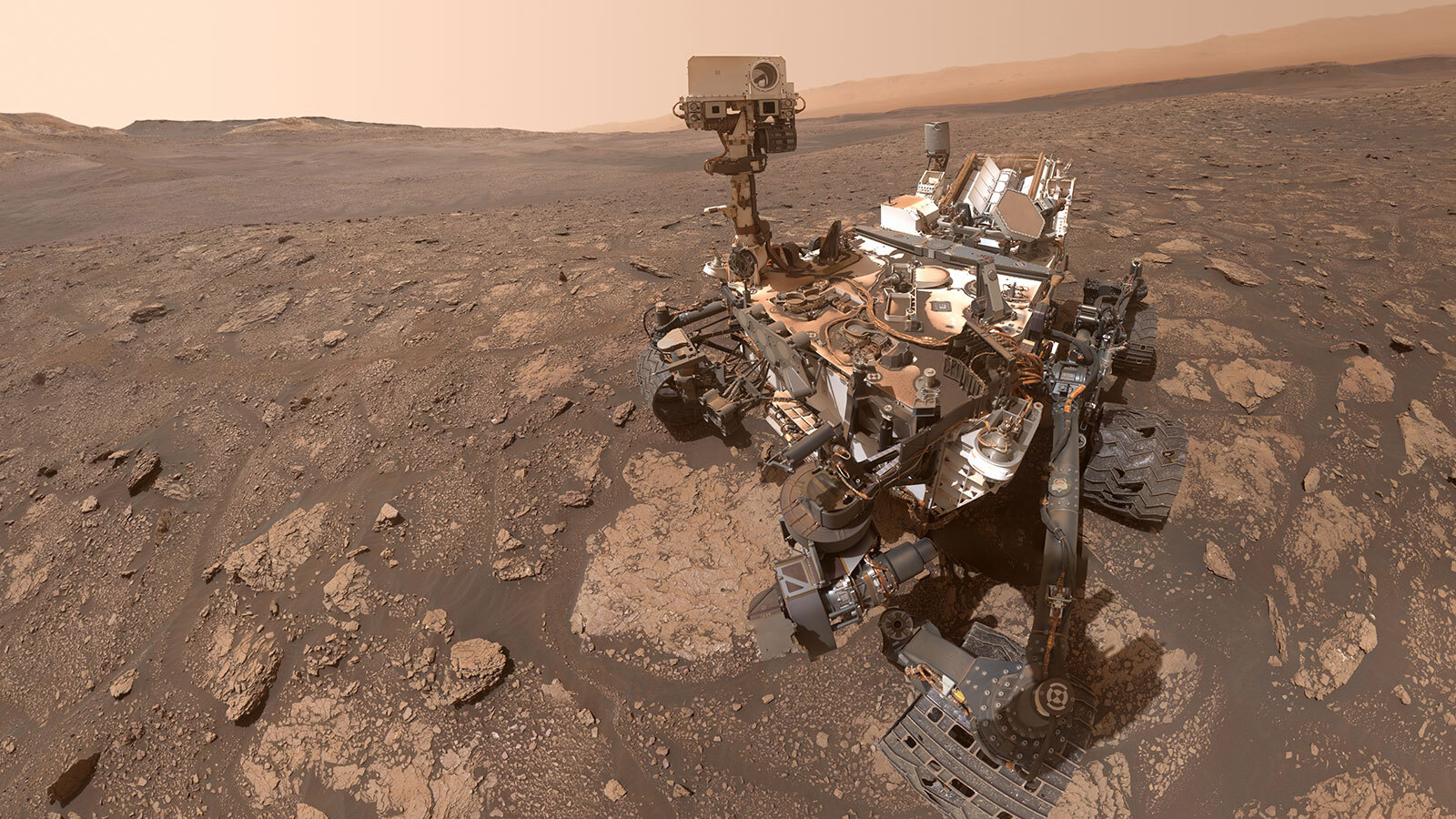
Il 6 agosto del 2012, dopo un viaggio durato più di 8 mesi, arrivava su Marte il Mars Science Laboratory (Curiosity). Nei giorni successivi al suo arrivo, mentre il rover avviava i sistemi per prepararsi all’esplorazione del pianeta rosso, il JPL era in fermento. In mezzo alla folla di tecnici, ingegneri e scienziati che si accalcavano nei corridoi dello Space Flight Operations Facility c’era anche un italiano: Paolo Bellutta, arrivato lì quasi per caso dopo aver risposto ad un annuncio della Nasa su internet.
Specialista in computer science, già dal 2004 Paolo lavorava come pilota di rover, prima con Spirit, poi con Opportunity. Da quel giorno in poi sarà ai comandi anche del nuovo arrivato. Ancora oggi Paolo guida Curiosity attraverso le sabbie di Marte, ed è l’uomo ad aver percorso più chilometri ai comandi di un rover, anche più dei piloti americani che lavorano con lui. Circa 17 chilometri complessivi tra i tre rover! È stato addirittura premiato dal Guinness dei primati per questo particolare record.
I rover sono i nostri occhi e le nostre braccia su Marte; grazie a loro possiamo esplorare un mondo completamente inaccessibile all’uomo (fino a questo momento). Ma la gestione di queste macchine è estremamente complessa a causa del delay nelle comunicazioni e dell’impossibilità di intervenire direttamente in caso di situazioni pericolose. Per capire come si pilota un rover su Marte abbiamo intervistato Paolo, direttamente dal JPL.
In cosa consiste il suo lavoro? Quali sono gli aspetti principali di cui lei si occupa nel controllo del rover?
Il nome ufficiale del mio ruolo è “rover planner“, ma in realtà quello che pianifico sono i comandi per muovere il rover sulla superfice di Marte. In pratica consiste nel negoziare con geologi ed altri scienziati come fare a raggiungere i punti dove poi vengono effettuate le varie osservazioni tramite gli strumenti di misura che abbiamo a bordo del rover. Una volta stabilito il percorso, io stendo una serie di comandi indicando la rotta e altri parametri che bloccano il rover nel caso alcuni valori indichino che il terreno potrebbe essere pericoloso. Questi parametri come pendenza o scivolosità del terreno sono solo parzialmente prevedibili da Terra ma sono calcolati momento per momento dal rover il quale può monitorare il loro andamento e quindi evitare di “mettersi nei guai”.
Quali sono le difficoltà e le responsabilità nella gestione di un rover? C’è mai stato un momento particolarmente critico nella sua carriera come pilota?
Direi che la difficoltà maggiore è quella di bilanciare i rischi rispetto alla possibilità di un ritorno scientifico durante l’esplorazione del pianeta. Ogni movimento che il rover esegue comporta un certo livello di rischio, a volte basso, altre volte alto. Può infatti rischiare di scivolare e rimanere bloccato in un’area da cui non riuscirebbe ad uscire. Dall’altro lato, spesso le rocce più interessanti o le zone che potrebbero darci molte più informazioni sul pianeta sono quelle che sono più inaccessibili.
Una distesa piana di sabbia è probabilmente meno scientificamente interessante rispetto ad una parete rocciosa con stratificazione variegata. Trovare il giusto equilibrio tra un aspetto e l’altro è a volte molto complesso. Uno dei momenti più critici è stato quello in cui abbiamo cercato di trovare un metodo per disincagliare il rover Spirit nel 2009. Purtroppo, dopo mesi di lavoro con simulatori e test con i rover sulla Terra siamo arrivati a trovare un metodo per farlo ma era ormai troppo tardi e questo portò alla perdita di Spirit e alla chiusura della missione.

Come viene scelto il sito da esplorare? Quali sono i fattori che influenzano la scelta del percorso da seguire?
Il punto di sbarco viene scelto in base ai dati raccolti dalle sonde orbitanti le quali ci forniscono osservazioni in remoto sulla composizione del terreno. Possiamo quindi determinare quali zone sulla superfice possono essere più promettenti per soddisfare gli obiettivi della missione. Una volta sbarcati, gli obiettivi giornalieri vengono scelti in base ad osservazioni fatte con le telecamere multispettrali installate sulla “testa” del rover.
Queste ci danno una vista ravvicinata di varie formazioni rocciose e della loro distanza rispetto al rover. Altre telecamere riescono anche a fornire dati riguardo alla conformazione del terreno e quindi quanto difficile può essere il percorso. Infine, una volta raggiunta la zona da osservare, Curiosity è equipaggiato con strumenti (ChemCam) che permettono una analisi iniziale a distanza di qualche metro. Se queste misure indicano qualcosa di interessante possiamo decidere di avvicinarci ancora di più e fare analisi a contatto o addirittura prelevare campioni che poi vengono analizzati da vari spettrometri all’interno del corpo del rover (CheMin, SAM).

Il suo lavoro subirà dei cambiamenti con l’arrivo di Perseverance su Marte? Sarà coinvolto nella gestione del nuovo rover?
Io ho deciso di non partecipare a questa nuova missione. Molti degli aspetti tecnici, quelli che sono forse più interessanti, saranno automatizzati su questo rover. La potenza di calcolo a bordo è notevolmente superiore rispetto a quella dei suoi predecessori. Per questo motivo certe valutazioni che attualmente vengono fatte “manualmente”, Perseverance riuscirà a farle direttamente a bordo. Questo ridurrà di molto il carico di lavoro per quelli che saranno chiamati a pilotarlo, ma allo stesso tempo anche il piacere di questo lavoro.
Il pilotaggio di Perseverance sarà diverso da quello di Curiosity? E da quello di Spirit e Opportunity?
Le differenze sono enormi. Innanzitutto Perseverance avrà potenza di calcolo di parecchi ordini superiori a quelle di Spirit e Opportunity. Oltre ai processori di bordo avrà un FPGA (Field Programmable Gate Array) dedicato all’elaborazione delle immagini per poter aumentare l’autonomia nella decisione sul percorso da scegliere e seguire. Spirit e Opportunity però sono stati i due rover che ci hanno insegnato come fare ad utilizzare queste macchine per esplorare un altro pianeta. Prima di questi avevamo solo una conoscenza su come operare sonde orbitanti ed alcune sonde stazionarie (landers) ma la gestione di sonde mobili presenta problemi fondamentalmente diversi. In pratica sono state loro le autrici dei “libri” in cui abbiamo accumulato le nostre esperienze, le difficoltà incontrate e le soluzioni adottate per aggirare vari problemi e disguidi tecnici.
Secondo lei come evolverà l’esplorazione robotica di Marte? In cosa saranno diverse le future missioni in termini tecnologici e operativi?
Sicuramente verranno create macchine più intelligenti che saranno in grado di affrontare terreni più difficili. Ma secondo me la parte più interessante sarà quella dell’uso dell’Intelligenza Artificiale per permettere ai rover futuri di decidere autonomamente quali campioni analizzare e quali misure eseguire. Abbiamo già utilizzato delle capacità molto elementari di AI (Artificial Intelligence ndr.) sui progetti MER (Mars Exploration Rover, Spirit and Opportunity) e successivamente su MSL (Mars Science Laboratory, Curiosity) ma c’è ancora molta strada da fare. C’è un po’ di resistenza da parte del lato scientifico in quanto toglie un po’ la paternità delle scoperte ed un po’ toglie il piacere del controllo di quali osservazioni fare, ma prima o poi la comunità scientifica apprezzerà quanto queste applicazioni di AI possano aprire nuove porte e cambiare fondamentalmente la comprensione di come Marte si sia evoluto nel tempo.
Continua a seguire Astrospace.it sul canale Telegram, sulla pagina Facebook e sul nostro canale Youtube. Non perderti nessuno dei nostri articoli e aggiornamenti sul settore aerospaziale e dell’esplorazione dello spazio.