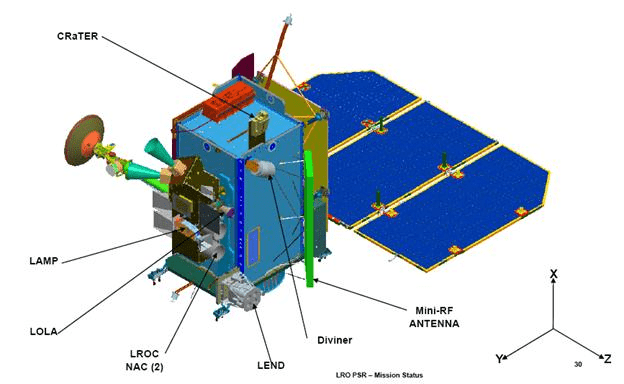
Il 15 luglio 2024 è stato pubblicato su Nature uno studio che dimostrava, per la prima volta nella storia, l’esistenza di un condotto sotterraneo sulla Luna tramite una mappatura radar. Per questa ricerca, guidata dal Professor Leonardo Carrer dell’Università di Trento, sono state utilizzate immagini radar ottenute dallo strumento Mini-RF a bordo del Lunar Reconnaissance Orbiter (LRO) della NASA. Si tratta della prima volta che viene confermata l’esistenza di un tunnel lavico, comunemente chiamato Lava Tubes, tramite la mappatura diretta del crollo di un suo soffitto, o pit.
La ricerca è stata condotta in collaborazione con l’Università di Padova. Fra i coautori della ricerca risulta anche il Dott. Francesco Sauro, specializzato nello studio di condotti sotto la superficie di altri corpi celesti.
Recentemente abbiamo raggiunto il Professor Carrer per porgli alcune domande su questa ricerca, le sue implicazioni e su come sono arrivati a questa scoperta che ha fatto discutere per diverse settimane. Ed è una storia veramente incredibile.
Può darci una definizione corretta di condotto o caverna lunare e raccontarci perchè questa ricerca è veramente la prima?
Precisiamo che noi non sappiamo se si tratta di una caverna o di un condotto; è corretto chiamarla una cavità protetta rispetto alla superficie. Per tantiun po’un anni abbiamo utilizzato una tecnica simile a quella usata sulla Luna, per studiare cavità terrestri e avevamo ben presente come la presenza di una grotta sarebbe dovuta apparire nell’immagine radar. Questo è un punto importante.
Il caso lunare è veramente tanto simile a quello terrestre, e già questo ci dava un forte indizio, anche senza analisi più specifiche.
Io credo sia assolutamente corretto parlare di condotto. Un’altra cosa interessante che non è stata detta è che quella zona era stata molto studiata con le immagini ottiche dallo spazio, ma con le immagini ottiche non si è riusciti a vederci all’interno.
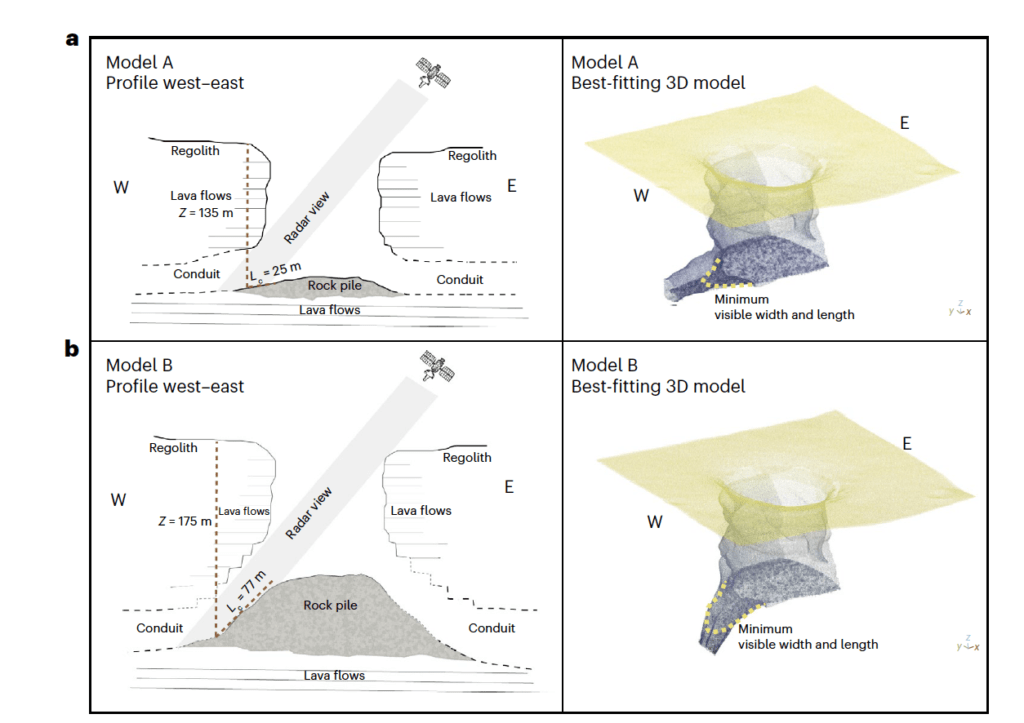
Prendendo tutte queste immagini ottiche, i ricercatori americani avevano sviluppato un modello 3D della prima parte, quindi dei muri interni al di sopra della grotta. Da un lato, non il lato che abbiamo visto noi, ma dall’altro lato, sono riusciti a vedere un po’ più all’interno, non fino a vedere la grotta, ma notavano un sottotetto un po’ spiovente.
Noi dal nostro lato vediamo più o meno la stessa simmetria. La pendenza che loro stimano da un lato è quella che noi vediamo dall’altro. Ma c’è un altro indizio fondamentale.
Ad esempio, circa due anni fa, dei ricercatori americani hanno usato il radiometro sulla stessa sonda del radar che abbiamo usato noi, il Lunar Reconnaissance Orbiter (LRO). Avevano osservato un comportamento molto singolare del pit dal punto di vista termico: durante il giorno tutto era alla stessa temperatura, ma di notte il pit aveva una temperatura più alta. Uno dei modi di spiegarlo era la presenza di una grotta, che manteneva il calore durante la notte.
In questi giorni, a riprova di queste evidenze, abbiamo ricevuto delle mail da un ricercatore americano che ci diceva che questo non è nulla di nuovo, perché con gli studi termici l’avevano già trovato. Però quella era una prova indiretta, dato che può esserci un’anomalia termica per tanti altri motivi. Si pensava già che le grotte sulla Luna potessero esistere, ma nessuno aveva mai fornito una prova concreta.
Siete riusciti a guardare solo fino a una certa profondità questa grotta, giusto?
Esattamente. Abbiamo stimato una larghezza minima della grotta basandoci sui dati che abbiamo, ma il nostro strumento ha dei limiti intrinseci nella capacità di rilevare dimensioni più ampie. Per visualizzare la tecnica in modo semplice, immagina di avere un buco e di guardarlo di lato con una torcia in mano. A seconda della geometria del buco, ciò che riesci a vedere può variare. Se la grotta è più larga di quanto riesci a vedere attraverso il diametro del buco, non puoi determinarlo con precisione solo guardando di lato.
In altre parole, la larghezza effettiva della grotta potrebbe essere molto più grande rispetto al diametro che osserviamo in superficie. Questo limite è più legato alla geometria e alla prospettiva piuttosto che alla tecnologia dello strumento stesso.
Nella regione del Mare Tranquillitatis ci sono degli indizi che fanno pensare a qualche altro condotto di minore o comunque della stessa entità, come fosse un sistema di tubi? O si tratta di un condotto isolato, e quindi davvero bisogna aspettare di avere dei dati con nuovi strumenti per fare delle analisi specifiche?
Questo è un condotto abbastanza isolato; mi pare che il più vicino sia intorno ai 100-150 chilometri di distanza. Dal punto di vista delle analisi, secondo me ne servono altre per poter trarre conclusioni. Il sensore che abbiamo utilizzato, MiniRF, ha una risoluzione abbastanza scarsa e le immagini sono poche. L’efficacia della tecnica dipende molto dall’angolo di vista, da come si guarda dentro il pit, e noi avevamo una sola immagine con un certo angolo di vista. Ci sarebbe piaciuto avere più angoli di vista per guardare all’interno, ma soprattutto una risoluzione migliore. La risoluzione di MiniRF è di circa 15×30 metri. Sulla Terra abbiamo usato un sensore a mezzo metro per mezzo metro, e lì di dettagli ne vedevamo veramente tanti.
Un altro aspetto interessante è che MiniRF era stato pensato all’epoca per mappare i poli lunari. La domanda principale sulla Luna tuttora, è se c’è ghiaccio d’acqua ai poli. Le orbite del sensore sono state pianificate per acquisire dati sui poli, non all’equatore, dove c’è la maggior parte delle grotte, quindi i dati che avevamo erano veramente pochi. Non c’è un altro sensore sulla Luna che possa fornirci gli stessi dati, quindi è stata veramente un’opportunità unica.

Prima lei accennava il fatto che queste grotte sono soprattutto all’equatore. Quindi le missioni dirette al Polo Sud, che sappiamo essere il focus dei programmi Artemis e di quello cinese, vanno un po’ in conflitto oppure la distribuzione di queste grotte non è ancora ben studiata?
Sì, al momento non sappiamo esattamente quante grotte ci siano sulla Luna. Potrebbero essercene di più di quelle finora identificate. Esiste un articolo di qualche anno fa che mostra immagini di possibili pit ai poli lunari. Se si conferma la presenza di ghiaccio d’acqua sulla superficie lunare, è altamente probabile che nel sottosuolo si trovi ghiaccio d’acqua, il che rende queste aree molto interessanti.
Le immagini LRO ottenute con la camera ottica mostrano alcuni skylight e pit, soprattutto nelle regioni equatoriali, che sono considerati i candidati principali per possibili accessi a grotte. Tuttavia, anche ai poli sono state recentemente fatte scoperte riguardanti pit e altre formazioni geologiche, ampliando le nostre conoscenze sulle potenziali ubicazioni delle grotte lunari.
Quale secondo lei è la missione già programmato o comunque a cui si sta già lavorando, più interessante per proseguire queste missioni nei prossimi anni?
Attualmente non ci sono piani concreti per future missioni lunari equipaggiate con un radar simile a quello che abbiamo utilizzato per questa scoperta. Speriamo che il nostro articolo possa stimolare l’interesse e la volontà di includere un radar di questo tipo in future missioni sulla Luna. La tecnologia è disponibile e potrebbe essere integrata anche in strumenti commerciali, ma per ora non ci sono iniziative programmate che prevedano l’uso di un radar del genere per esplorazioni lunari.
Forse portandolo direttamente sul Lunar Gateway sarà ancora più facile essere più flessibili, più veloci anche nell’adattarsi a queste esigenze di ricerca?
Sì, portare un radar sul Lunar Gateway potrebbe essere un’opzione interessante. Tuttavia, molto dipende dall’orbita del Lunar Gateway e dalla sua capacità di osservare adeguatamente all’interno delle grotte con il radar. Le possibilità sono molteplici e dovremo aspettare nei prossimi anni per vedere come evolveranno le missioni. Inoltre, non possiamo dimenticare che la Cina ha programmi spaziali molto avanzati di cui non si sa molto; potrebbe essere che abbiano già in progetto qualcosa in questa direzione. Non è da escludere, come battuta, che stiano già lavorando su qualcosa di simile.

Ci può raccontare la storia di questo sensore?
Un aneddoto di MiniRF è che è un sensore con una storia particolare. È stato lanciato per fare queste misure, ma dopo un paio d’anni hanno arrestato lo scienziato responsabile per spionaggio, quindi è rimasto senza il Principal Investigator.
Inoltre, questi sistemi radar funzionano come un trasmettitore e un ricevitore, e dopo qualche anno in orbita, il giorno di Natale si è rotto il trasmettitore. Noi abbiamo utilizzato i dati di quando ancora funzionava.
Ma non si sono dati per vinti, e il sensore ha continuato a fare acquisizioni in modalità bistatica: si trasmetteva dalla Terra un’onda elettromagnetica che rimbalzava sulla Luna, e il ricevitore di MiniRF, che ancora funzionava, riceveva il segnale di rimbalzo e faceva le misure. Trasmettevano da Arecibo, che si è rotto anche quello. È un sensore con una storia incredibile.
Penso che MiniRF sia ancora operativo, e che stiano cercando di utilizzarlo. Ora vogliono tentare di effettuare ancora misure dalla Terra, ma con il radiotelescopio di Goldstone. Fare una scoperta del genere con MiniRF è un po’ la rivincita del sensore, dopo questa storia travagliatissima.
Per scoprire veramente se questo pit è collegato ad altri, servono più dati e più missioni, sia dall’orbita che con evoluzioni di MiniRF. La tecnologia c’è, la usiamo tutti i giorni sulla Terra, e sarebbe bello avere una missione robotica per farlo. L’immagine radar è utile, ma non ci permette di comprendere tutto. Un rover che facesse una mappatura LiDAR o una semplice foto all’interno della grotta sarebbe perfetto.
Al momento, non abbiamo la minima idea di come sia l’interno della grotta. Con il radar vediamo solo l’entrata e la prima parte, ma non riusciamo a capire la reale estensione. Abbiamo stimato una lunghezza di 30-80 metri, ma questo è quello che riusciamo a vedere. Anche sulla Terra è la stessa cosa: vedevamo fino a un certo punto, ma sapevamo che le grotte continuavano.
Secondo lei, questa scoperta aprirà un’altra sfida a chi arriverà prima dentro queste grotte?
Potrebbe succedere, ad esempio, per mapparle: noi ne abbiamo mappata una, ma ce ne sono tante altre. Penso che il driver principale che potrebbe far nascere una corsa alle grotte, ma diciamo alla Luna in generale, è il fatto che potrebbero esserci risorse all’interno.
Della composizione di queste grotte, sappiamo ben poco. La questione si può vedere in due modi: per studiare le rocce all’interno e capire il passato lunare e il vulcanismo lunare, dato che sono rocce che non hanno subito alterazioni della superficie. È proprio il posto perfetto per studiare il passato lunare attraverso le rocce.
Dall’altra parte, ci sono i materiali. Non sappiamo se ci sono materiali utili, come ad esempio ghiaccio d’acqua all’interno delle grotte. È possibile. Questo provocherà l’apertura di nuove domande: di chi è la grotta? Chi arriva prima può utilizzarla? Chi può estrarre risorse? Sono scenari che effettivamente sembrano un po’ da fantascienza, però potrebbero diventare realtà nel futuro.
I cinesi per esempio stanno facendo degli sforzi veramente senza pari rispetto ad altre agenzie per questa ricerca. Quello che noi speriamo è che, a valle di questo articolo, se l’ESA, la NASA, la JAXA o chiunque altro abbia una lista delle loro priorità in campo di esplorazione spaziale, lo studio delle grotte finirà un po’ più su nella lista.
–> Abbiamo parlato con il Professor Carrer per diverso tempo. Puoi leggere l’intervista integrale, con l’intera storia della ricerca e del radar MiniRF su Astrospace ORBIT. <–