Il 6 gennaio 2024, lo strumento SHERLOC (Scanning Habitable Environments with Raman & Luminescent for Organics and Chemicals) a bordo del rover Perseverance della NASA su Marte ha iniziato a non funzionare più correttamente. Una delle due coperture che impediscono l’accumulo di polvere sull’ottica era parzialmente aperta, e interferiva con le operazioni di raccolta dei dati scientifici. L’Agenzia ne aveva dato notizia a inizio febbraio.
Ora, dopo 6 mesi di tentativi per risolvere la situazione, la NASA ha annunciato che il 17 giugno SHERLOC è tornato a raccogliere dati correttamente. Ha analizzato una roccia con il suo spettrometro e la sua fotocamera per la prima volta da gennaio, quindi tutte le sue componenti sembrano funzionare.
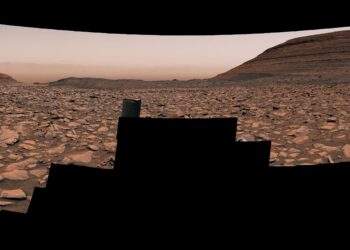
Questo risultato conferma che SHERLOC, parte molto importante della suite di sette strumenti di Perseverance, è tornato ufficialmente operativo. Proprio ora che il rover sta studiando una regione molto interessante, la “Margin Unit”, lungo l’interno del bordo del cratere Jezero, ormai al termine della sua quarta campagna scientifica.
L’origine del problema
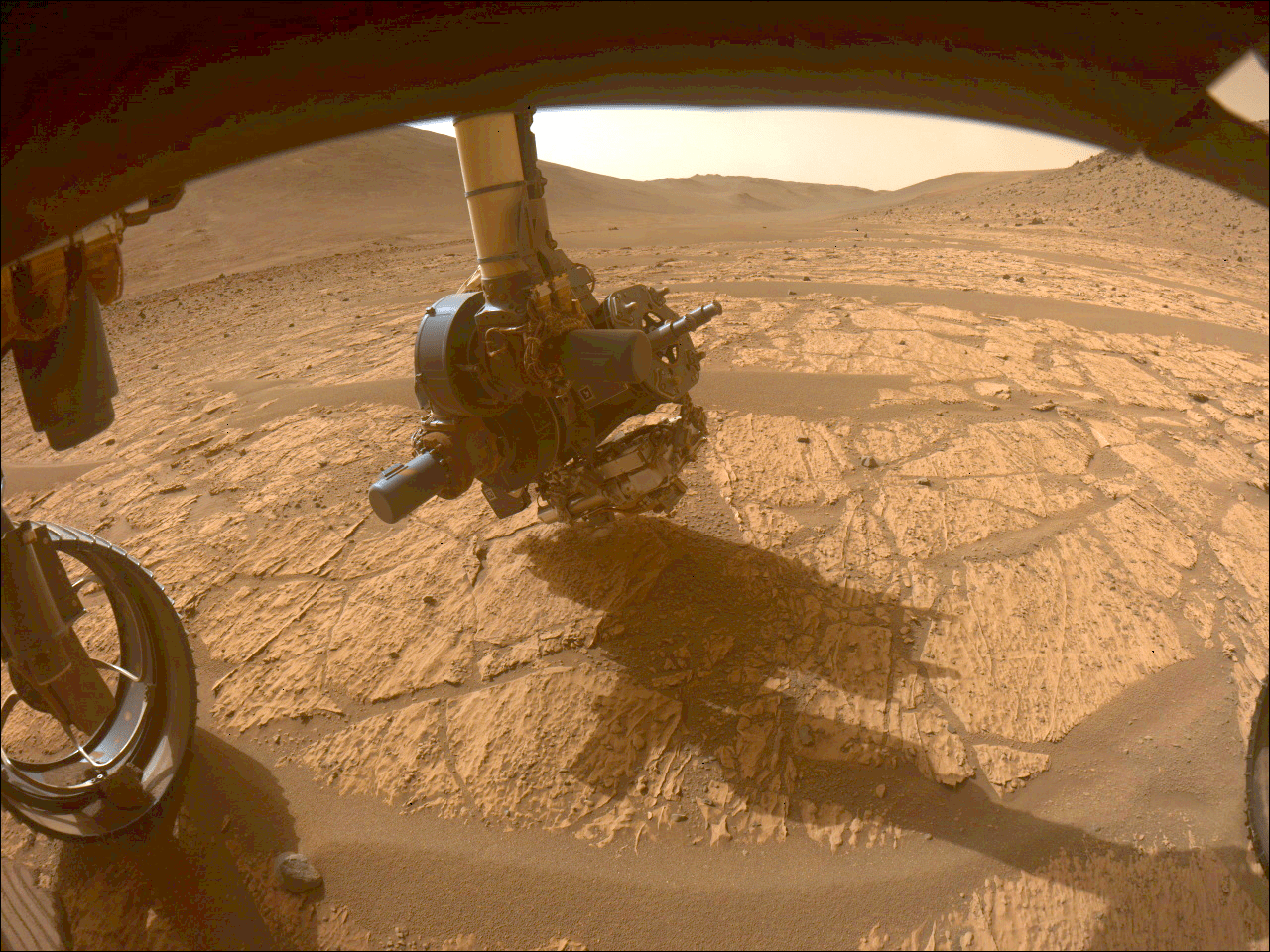
Lo strumento SHERLOC è montato sul braccio robotico di Perseverance. Utilizza due telecamere e uno spettrometro laser per cercare composti organici e minerali nelle rocce che sono stati alterati in ambienti acquosi, e che potrebbero rivelare segni di vita microbica passata.
Il 6 gennaio, un copriobiettivo mobile progettato per proteggere l’ottica dello spettrometro dello strumento e una delle sue fotocamere dalla polvere si è congelato in una posizione che impediva a SHERLOC di raccogliere dati. Di seguito, una animazione ottenuta con immagini da una delle telecamere di navigazione a bordo di Perseverance, che mostrano la posizione scorretta di una copertura di SHERLOC. Credits: NASA/JPL-Caltech
L’analisi del team SHERLOC ha evidenziato il malfunzionamento di un piccolo motore, responsabile dello spostamento del coperchio protettivo della lente e della regolazione della messa a fuoco dello spettrometro e della fotocamera Autofocus and Context Imager (ACI). Testando potenziali soluzioni su un modello dello strumento SHERLOC qui a Terra al JPL, il team ha quindi iniziato un lungo e meticoloso processo di valutazione per vedere se (e come) il copriobiettivo potesse essere spostato in posizione aperta.
Mesi di tentativi, per un successo finale
Tra i molti tentativi, il team ha provato a riscaldare il piccolo motore del copriobiettivo, comandando al braccio robotico del rover di ruotare lo strumento SHERLOC sotto diverse orientazioni con immagini di supporto Mastcam-Z. Così da far oscillare il meccanismo avanti e indietro, per allentare eventuali detriti che avrebbero potuto inceppare il copriobiettivo. Hanno anche azionato il trapano a percussione del rover per provare a liberarlo.

Il 3 marzo, le immagini restituite da Perseverance hanno mostrato che il copriobiettivo ACI si era aperto di oltre 180 gradi, liberando il campo visivo dell’imager e consentendo di posizionare l’ACI vicino al suo bersaglio. Era però ancora necessario un modo per mettere a fuoco lo strumento su un bersaglio: senza messa a fuoco, le immagini di SHERLOC sarebbero state sfocate e il segnale spettrale sarebbe stato debole.
Il team ha quindi fatto affidamento sul braccio robotico del rover per apportare piccole modifiche alla distanza tra SHERLOC e il suo bersaglio, così da ottenere la migliore risoluzione dell’immagine. A SHERLOC è stato ordinato di scattare foto del suo obiettivo di calibrazione in modo che il team potesse verificare l’efficacia di questo approccio.
La conferma del posizionamento preciso dell’ACI su un bersaglio roccioso marziano è arrivata il 20 maggio. Il 17 giugno invece è arrivata quella che anche lo spettrometro era funzionante. In questo modo, SHERLOC può tornare operativo al 100%.
Art Thompson, project manager di Perseverance al JPL, ha affermato:
La squadra non si è mai arresa. Con SHERLOC di nuovo online, stiamo continuando le nostre esplorazioni e la raccolta di campioni con una gamma completa di strumenti scientifici.