Lo scorso 26 settembre la NASA ha portato a termine un’altra storica missione riuscendo a far impattare con successo la sonda DART contro l’asteroide Dimorphos per testare la deflessione della sua traiettoria. Il 12 ottobre la NASA ha inoltre confermato che l’impatto di DART ha variato la durata dell’orbita del satellite di 32 minuti. Si tratta di un risultato sensazionale, e di una missione unica nel suo genere, ma c’è un altro fatto di assoluta rilevanza che forse è passato inosservato ai più.
Non solo DART ha fatto qualcosa che nessuno aveva mai fatto prima, ma lo ha fatto in un modo assolutamente innovativo e rivoluzionario. La straordinarietà dell’evento risiede nel metodo di navigazione che è stato utilizzato per guidare la sonda fino al suo obiettivo. Per capire come DART e LICIACube hanno cambiato il modo di fare navigazione, facciamo un passo indietro e cerchiamo di capire prima di tutto cosa vuol dire fare Navigazione nello spazio.
Cosa si intende con Spacecraft Navigation?
Qualsiasi missione che viene lanciata nello spazio, indipendentemente dai suoi obiettivi, sarà dotata di un apparato di Guidance Navigation and Control (GNC). Questi tre termini indicano tre diverse fasi attraverso cui una missione viene operata. Con il termine Guidance si identifica il processo di ottimizzazione della traiettoria, ovvero la ricerca della traiettoria ottimale e della sequenza di controlli che garantisce di soddisfare determinati vincoli di missione, come ad esempio il consumo minimo di propellente o la massima durata della missione.
Tipicamente la fase di Guidance viene svolta a terra durante la progettazione della missione. La Navigation viene invece eseguita durante la fase operativa. Fare Navigation significa infatti ricostruire la posizione della sonda rispetto ad un dato sistema di riferimento. In altre parole con la navigazione si vuole sapere dove si trova la sonda. Nel caso in cui la posizione rilevata si discosti dalla traiettoria di riferimento identificata dalla Guidance, si ricorre a manovre correttive per ripristinare la traiettoria ideale. È questa la fase di Control.
All’interno del loop di GNC esistono diverse strategie per eseguire la Navigation, e la scelta dipende dal tipo di missione. I satelliti in orbita bassa terrestre (LEO) sono supportati dai Global Navigation Satellite Systems (GNSS), ovvero le costellazioni come GPS, Galileo e GLONASS. Tramite un opportuno ricevitore (come quello GPS), i satelliti in LEO possono ricostruire la loro posizione sfruttando la triangolazione del segnale proveniente da queste architetture satellitari, allo stesso modo di come noi utilizziamo il GPS per localizzarci sulla superficie terrestre.
Sebbene siano stati fatti studi per sfruttare il segnale GNSS anche per satelliti che si trovano molto lontani dalla terra (sfruttando per esempio i side-lobes del segnale) l’utilizzo dei sistemi GNSS non può essere certamente applicato per missioni interplanetarie e deep space.
In questi casi la navigazione viene svolta normalmente trasmettendo un segnale radio alla sonda, la quale risponde con un altro segnale. Misurando il delay tra l’invio e la ricezione si può calcolare la distanza della sonda (Ranging) mentre la sua velocità si ottiene misurando lo shift di frequenze (Doppler-Shift). Sovrapponendo le misurazioni di più Ground Station è quindi possibile ricostruire lo stato della sonda in termini di posizione e velocità. Per poter operare questo tipo di navigazione nel caso di sonde interplanetarie, è necessario affidarsi alle antenne del Deep Space Network (DSN) della NASA, che consentono d’inviare questi segnali su distanze molto maggiori rispetto ad una comune Ground Station.
La Navigazione Autonoma di DART
Torniamo ora a DART e LICIACube. La grande innovazione portata da queste due sonde è il fatto che la navigazione non è stata svolta da terra utilizzando il DSN, ma è stata eseguita direttamente a bordo delle due sonde in maniera del tutto autonoma. Questo aspetto è stato di fondamentale importanza per l’esito positivo della missione. L’avvicinamento a Didymos ha infatti richiesto un controllo ad alta precisione che non si sarebbe potuto ottenere comandando la sonda da terra a causa del delay di 40 secondi nelle comunicazioni.
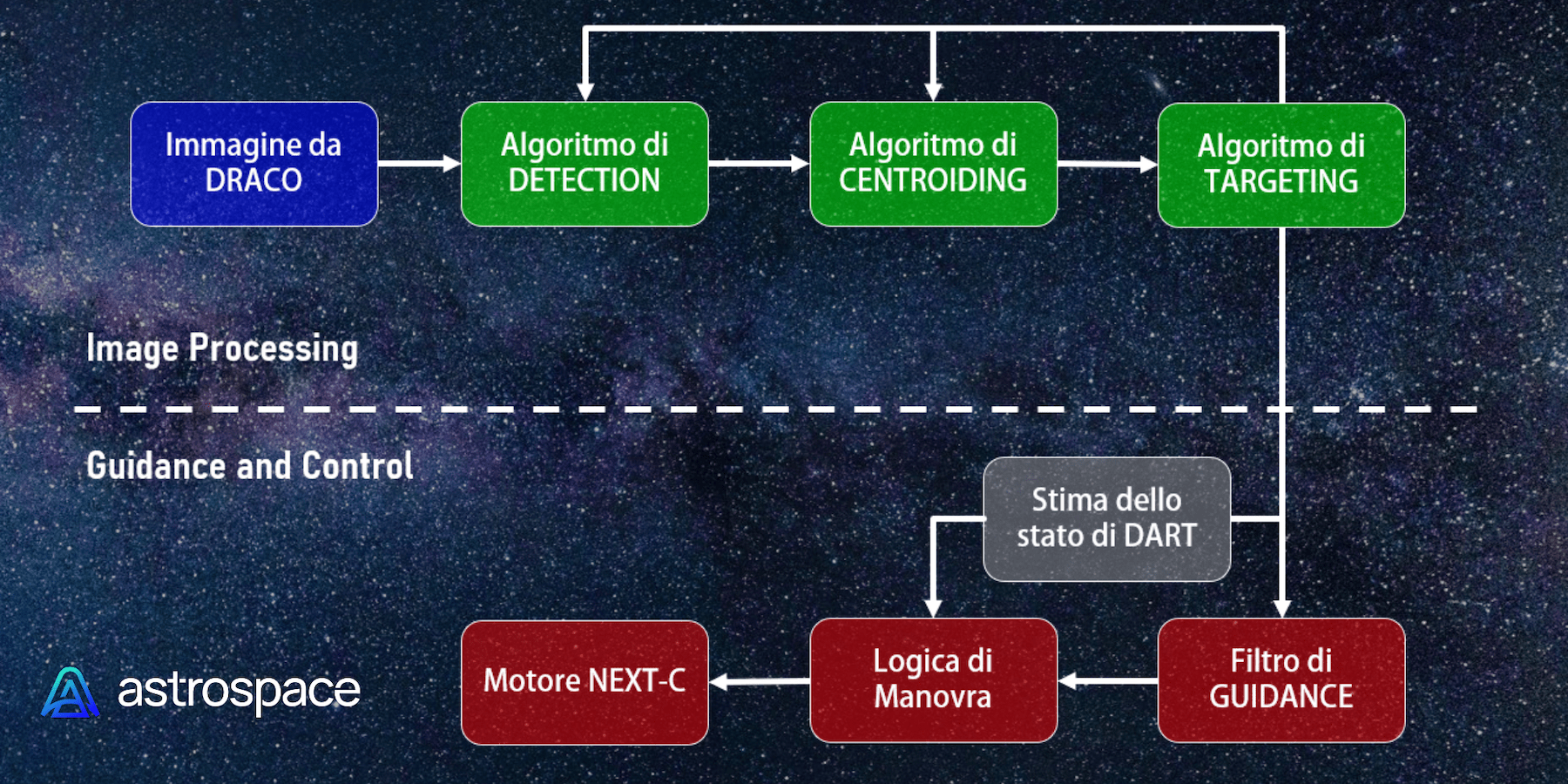
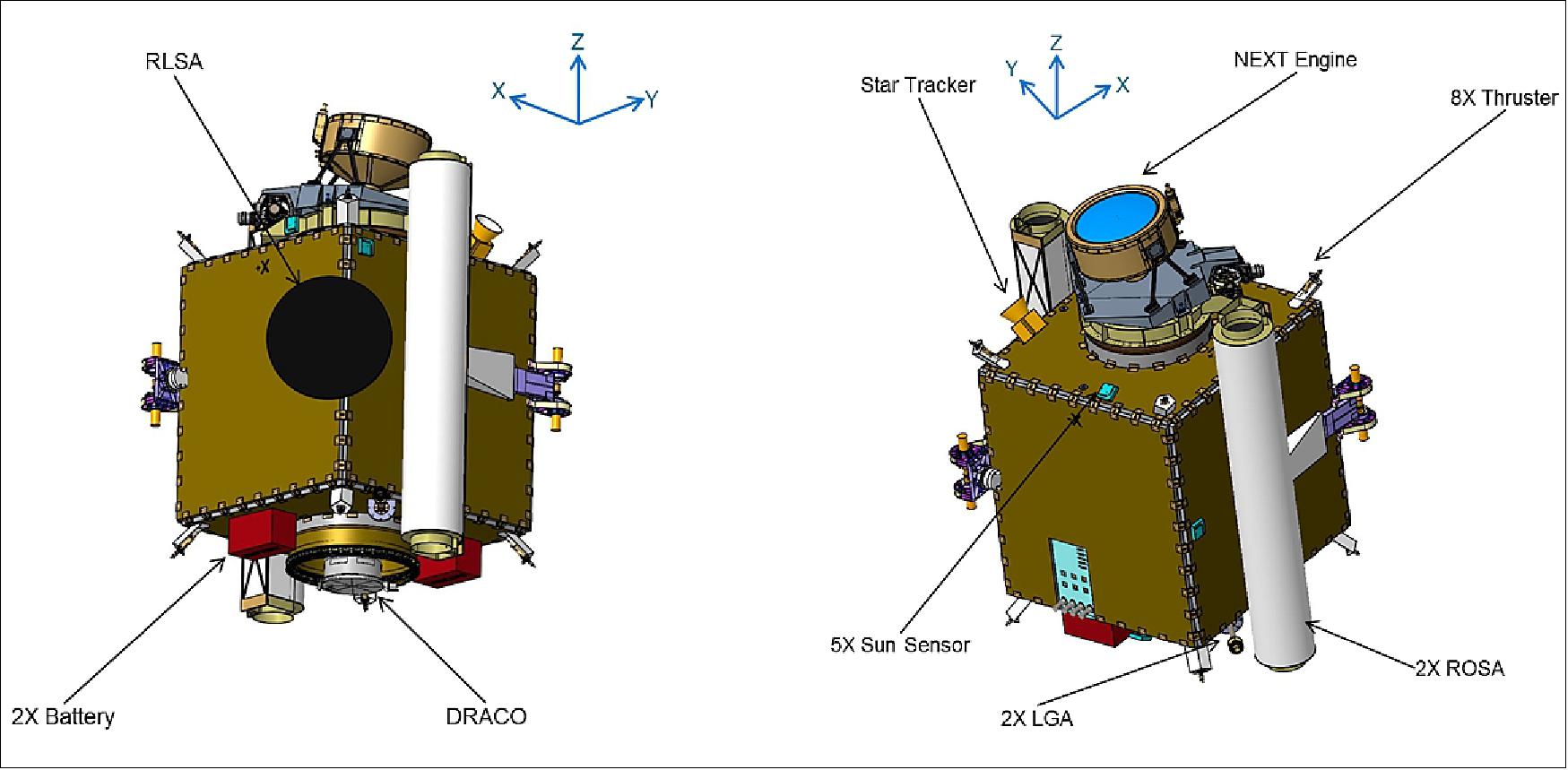
Il sistema che ha permesso a DART di navigare autonomamente verso il suo target è lo SMART Nav (Small-Body Maneuvering Autonomous Real Time Navigation). Lo SMART Nav, sviluppato dagli ingegneri del John Hopkins Applied Physics Laboratory, è stato pensato per interfacciarsi con la camera DRACO e con il sistema propulsivo di DART. Utilizzando appositi algoritmi d’intelligenza artificiale, SMART Nav ha processato le immagini scattate da DRACO e da quelle ha ricostruito la sua posizione relativa all’asteroide, calcolando in maniera continuativa le correzioni da eseguire con il motore NEXT-C per rimanere in rotta di collisione.
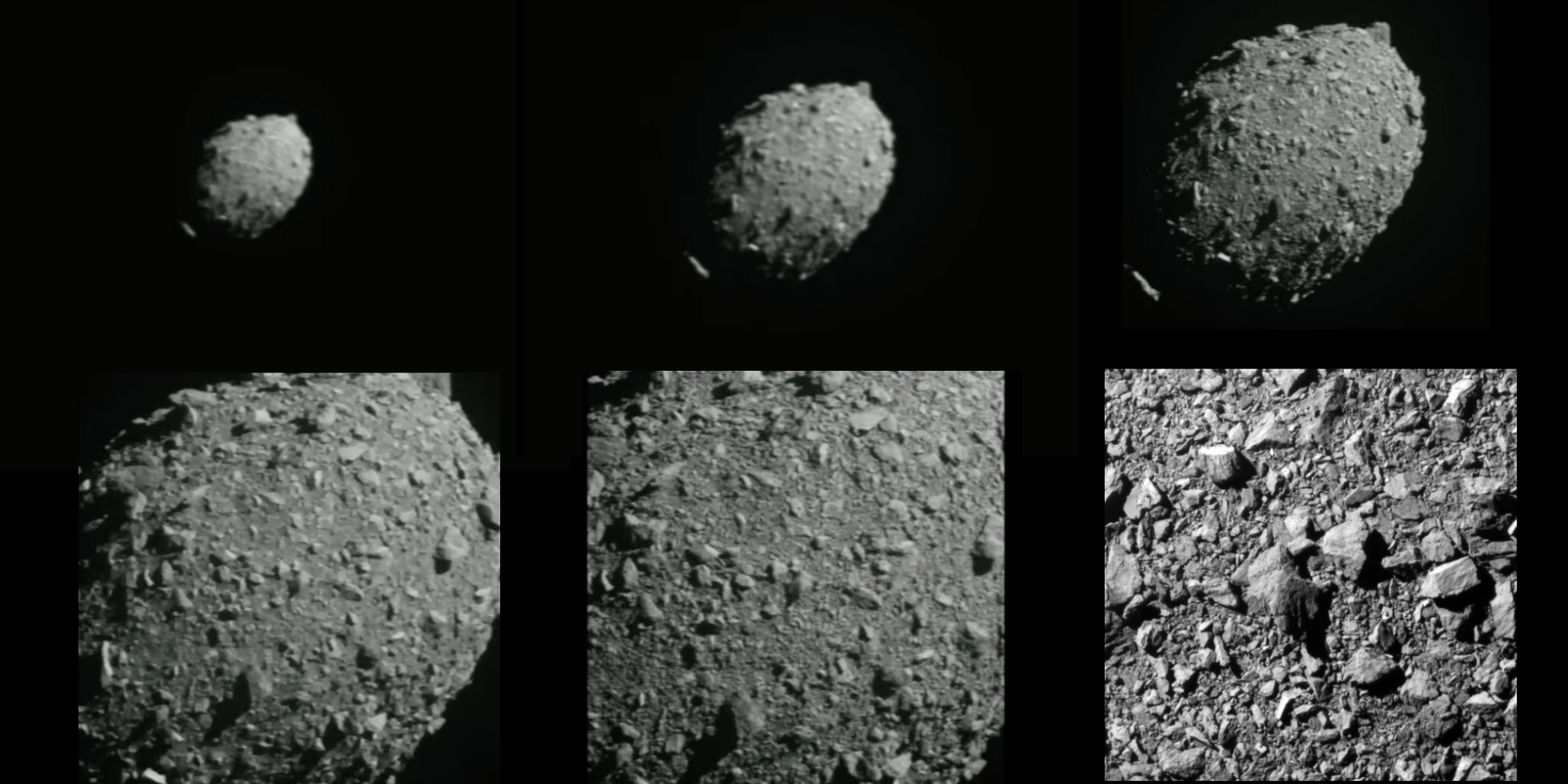
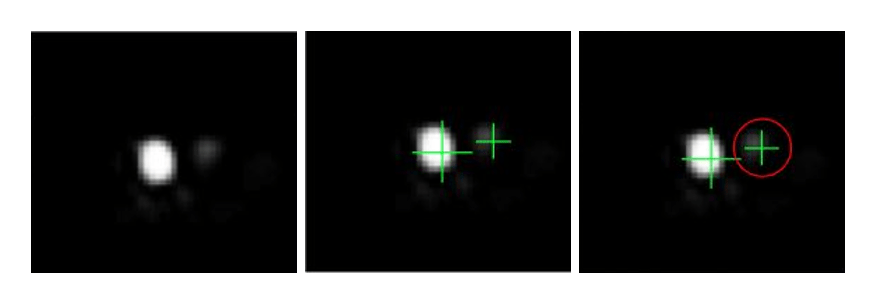
La navigazione autonoma è iniziata quattro ore prima dell’impatto, quando DART si trovava a circa 90.000 chilometri dal target. La camera DRACO ha iniziato ad acquisire immagini nelle quali il sistema di Didymos e Dimorphos appariva come un debole puntino luminoso, poco più grande di un pixel, in mezzo a tante altre stelle. Le immagini scattate sono state processate dall’algoritmo di Detection-Blobbing responsabile dell’identificazione del sistema di asteroidi. Solamente un’ora prima dell’impatto è stato poi possibile distinguere i due corpi l’uno dall’altro. A questo punto l’algoritmo di Centroiding ha stimato i centri dei due target mentre l’algoritmo di Targeting ha identificato il più piccolo dei due: Dimorphos.
A partire da quel momento il target è stato agganciato e il suo moto è stato tracciato da un algoritmo chiamato Filtro di Guidance, responsabile anche di elaborare le possibili traiettorie d’inseguimento. Sulla base delle informazioni provenienti dal Filtro di Guidance, SMART Nav ha poi calcolato le manovre da eseguire per rimanere in rotta di collisione rispettando il quantitativo di propellente a disposizione.
L’implementazione degli algoritmi di navigazione ha richiesto decine di migliaia di simulazioni per “addestrare” lo SMART Nav. Il problema principale era infatti che non si aveva idea dell’aspetto dell’asteroide, della sua conformazione e delle condizioni di luce che ci sarebbero state. Per questo motivo gli algoritmi dovevano essere pronti ad ogni possibile scenario.
La tecnologia di Autonav era già stata testata in passato a bordo di una manciata di missioni come Deep Space I (1998) e Deep Impact (2005), ma con strategie leggermente diverse e senza la possibilità di poter contare sui progressi nel campo dell’intelligenza artificiale e del machine learning che abbiamo raggiunto oggi.
La Navigazione Autonoma di LICIACube
Se già la navigazione autonoma implementata su DART è stata una grande dimostrazione tecnologica, lo stesso tipo di navigazione utilizzato su LICIACube lo è ancora di più. Il piccolo cubesat prodotto dall’azienda italiana Argotec ha infatti dimostrato che anche con le risorse limitate di un satellite di piccola taglia è possibile eseguire una navigazione di questo tipo. Abbiamo chiesto a l’Ing. Emilio Fazzoletto Head of Electronic Unit in Argotec di spiegarci brevemente come funziona il sistema di navigazione di questo piccolo satellite, progettato, costruito e operato internamente dall’azienda torinese:
Il sistema di navigazione autonoma di LICIACube ha agito principalmente sull’assetto del satellite, mentre quello di DART agiva sulla traiettoria, per permettere l’impatto. Nei giorni precedenti al flyby noi abbiamo modificato la traiettoria di LICIACube in maniera comandata da Terra, poi il flyby è stato gestito in automatico e il sistema di navigazione autonoma si è occupato di cambiare l’assetto del satellite per tenere i corpi centrati nelle telecamere. L’ultimo comando è stato mandato verso le 12 del 26 settembre, circa 12 ore prima del flyby.
LICIACube ha scattato oltre 600 immagini durante il flyby. Alcune di queste, invece di essere salvate in memoria, sono state elaborate in real time, già in poche decine di millisecondi venivano estratte molte informazioni. Questo sistema, chiamato Image based target recognition, per la prima volta usato in un cubesat di queste dimensioni, riconosceva i due target, estraeva la loro posizione eliminando il rumore e osservava come i due corpi si muovevano nelle foto. Questo ha permesso di ricostruire com’era la traiettoria di avvicinamento. Tutto questo il software di bordo lo ha fatto nei quattro minuti prima dell’avvicinamento.
? Where is #LICIACube now?
➡️ LICIA is at 8.5 million km and it is getting closer to Earth. It has left behind the asteroid system and continues to navigate among the stars.@ASI_spazio@NASA
1/3 pic.twitter.com/EmJj9mz7zO— Argotec (@Argotec_Space) October 12, 2022
Durante il flyby, l’assetto del satellite è stato controllato: LICIACube si è girato seguendo un semicerchio, come se passando in autostrada si voglia mantenere la testa puntata all’autogrill. Questo è stato fatto in automatico una volta che il sistema ha ricavato la vera trattoria di avvicinamento.
Per Per fare questo è stata usata solo la camera principale, su cui è installato il sensore monocromatico. Sarebbe stato impossibile riconoscere i due corpi nei minuti precedenti il flyby con il payload secondario, perchè con un Point of View molto più grande sarebbe stato impossibile vedere Dimorphos a quella distanza. 4 minuti prima del flyby, a 1500 km di distanza il satellite era già fissato sul target.
È stato più più difficile progettare e programmare la fase di flyby o quella di individuazione del target prcedente?
Credo sia stato difficile far funzionare tutto assieme con le performance necessarie. La parte di riconoscimento delle immagini e individuazione del target si basava su quella di ArgoMoon. C’erano però due problemi. In ArgoMoon la dinamica degli eventi è molto più lenta e abbiamo dovuto velocizzare il sistema di quasi 100 volte. Una serie di cose che prima erano calcolate in Software in LICIACube sono state implementate in Hardware, direttamente su un chip custom programmato appositamente.
Dall’altra parte è stato difficile far funzionare tutto assieme. LICIACube aveva il problema di determinazione della traiettoria, poi il problema delle performance del controllo di assetto. Abbiamo dovuto sviluppare internamente anche l’algoritmo per il controllo delle ruote d’inerzia. La difficoltà, oltre ad estremizzare le performance è stato mettere tutto assieme, far funzionare un sistema che non era solo di riconoscimento delle immagini, ma univa anche ricostruzione orbitale della traiettoria e comando dell’assetto, il tutto che doveva girare con prestazioni elevatissime. Nel momento di picco della velocità angolare di LICIACube stiamo parlando di 10 gradi al secondo come ordine di grandezza.
[Termine intervista]
Ricordiamo che LICIACube è una missione ideata, finanziata e coordinata dall’ASI, progettata e operata da Argotec in coordinamento con ASI, INAF e i team di navigazione dell’Università di Bologna e analisi di missione del Politecnico di Milano.
L’importanza della navigazione autonoma
Perché questa tecnologia è rivoluzionaria? La navigazione autonoma dimostrata da DART e da LICIA apre le porte a infinite possibilità nell’esplorazione interplanetaria. Potendo sfruttare questa tecnologia sarà infatti possibile bypassare il collo di bottiglia del DSN che, a causa del sempre crescente numero di missioni interplanetarie, sta diventando un fattore critico limitante oltre che molto costoso da operare.
Non solo: grazie alla navigazione autonoma si riuscirà a risolvere il problema del delay, aprendo la possibilità ad una serie di manovre di precisione (come impattare un asteroide) che altrimenti non sarebbero possibili. C’è poi un altro fatto di fondamentale importanza. Il settore spaziale già da diversi anni si sta muovendo nella direzione di missioni di piccola taglia: i cubesat. Questa filosofia che già ora domina l’orbita bassa terrestre, nel prossimo futuro verrà adottata anche nel contesto di missioni interplanetarie e deep space.
Grazie ai cubesat è infatti possibile abbattere i costi e i tempi di sviluppo e produzione, al prezzo di dover ripensare il concetto di satellite in un modo smart ed efficiente. Questo per poter includere le funzionalità delle grandi sonde nel volume di una scatola da scarpe, con tutte le criticità che ne conseguono (potenza ridotta, meno propellente ecc.). Un sistema di navigazione autonoma diventa fondamentale per evitare d’impiegare preziose risorse per inviare i segnali di Ranging e Doppler a terra. In questo LICIAcube ha svolto (e sta svolgendo) il ruolo di apripista, dimostrandone la fattibilità.
In conclusione, DART e LICIAcube hanno compiuto un’impresa unica nel suo genere. Ma gran parte della straordinarietà della missione risiede nella dimostrazione che la navigazione autonoma è possibile. E questo aprirà scenari impensabili nell’esplorazione interplanetaria.
Continua a seguire Astrospace.it sul canale Telegram, sulla pagina Facebook e sul nostro canale Youtube. Non perderti nessuno dei nostri articoli e aggiornamenti sul settore aerospaziale e dell’esplorazione dello spazio.